En este documento se describen los pasos que se han ido realizando para generar un modelo BIM as Built de un tramo de carreteras a partir de diferentes Bases de Datos Existentes. El documento describe las problemáticas encontradas durante la elaboración del modelo y posibles soluciones a futuro para poder digitalizar todo el inventario de carreteras y garantizar su futura conexión con todos los sistemas de gestión.
El ejercicio realizado viene de un encargo del
Departament de Territori i Sostenibilitat de la Generalitat de Catalunya para comprobar la viabilidad de generar un modelado automático de un tramo de carreteras a partir del Catálogo existente, y para analizar la posible utilización de metodologías escalables y poder generar en un futuro el traspaso a BIM de forma automatizada de la red de 6.000 km actualmente ya digitalizada dentro del sistema de inventario.
Por otro lado el mismo Departamento había realizado las primeras pruebas piloto de utilizar el
BIM en la fase de construcción de carreteras y sobre todo, para establecer los requerimientos de información y contenido que deben de tener los entregables
BIM as Built, y que estos a su vez dispusieran de la información necesaria a la hora de alimentar todos los sistemas de gestión y operación. Estos entregables deben de contener información precisa en función del tipo de elemento y se deben de realizar en formato abierto (Open BIM) , siendo el .ifc el archivo dispuesto.
Por otro lado, el Departament inició en el año 2000 diferentes campañas de creación del VIC – Visor de Inventario de Carreteras. Este visor se construye a partir de captación masiva de datos mediante la tecnología Mobile Mapping y el posterior traslado de estos datos (imágenes, coordenadas, tipología de elementos) combinando de forma manual y automática la creación inicial de la base de datos.
Los datos contenidos en el VIC comprenden varias tipologías: alfanuméricos, imágenes y nubes de puntos, en donde para la zona del proyecto se han utilizado los datos de la campaña 2015
Fuentes de información
A partir de esos datos alfanuméricos contenidos: definición del tramo de carretera, ancho, tipo y coordenadas de ubicación de los elementos, .... Se ha realizado la generación del modelo automático y la incorporación de los datos de categorización.
Ubicación del proyecto y datos del terreno
La realización de la prueba ha requerido diferentes fuentes de información. Por una parte toda la comprendida en el propio Inventario de Carreteras, y posteriormente por un tema de contexto y de comprobación se han utilizado diferentes fuentes de información.
Para la comprobación del ámbito correcto del proyecto se han utilizado los datos del GRAFO de Carreteras , en su variante de capa de ejes (capa vectorial lineal de la carretera) y la capa de los pk (capa vectorial de puntos).
Para realizar este análisis inicial se ha utilizado la herramienta
QGIS, en donde se observa la ubicación del intervalo de estudio, concretamente la carretera C-12 en su paso por la localidad de Flix, entre los pk 85+000 y el pk 88+000. Por otra parte, para obtener las datos del terreno en el contexto territorial del estudio se han utilizado los datos del ICGC (Instituto Cartográfico y Geológico de Catalunya), la malla lidar 2x2 (MET-2) , la núm 250-133, que corresponde a una parte del TM de Flix en toda el área de proyecto. Se optó por esta opción al ser la de más calidad enfrente de otras alternativas de datos cartográficos: malla 5x5 o malla 15x15. En cuanto a la utilización del GRAFO se ha utilizado el enlace WFS directo.
A partir del proceso de análisis inicial se muestra que todo el contexto del proyecto se encaja dentro de la misma malla de terreno, de esta forma no ha sido necesario realizar ninguna operación geoalgorítmica en temas de tratar los datos de los modelos digitales de elevación del terreno ni tener que generar fusión o recorte de
rásters de todos los datos obtenidos.
En las siguientes imágenes se muestra el contexto del proyecto y la información utilizada para este contexto:
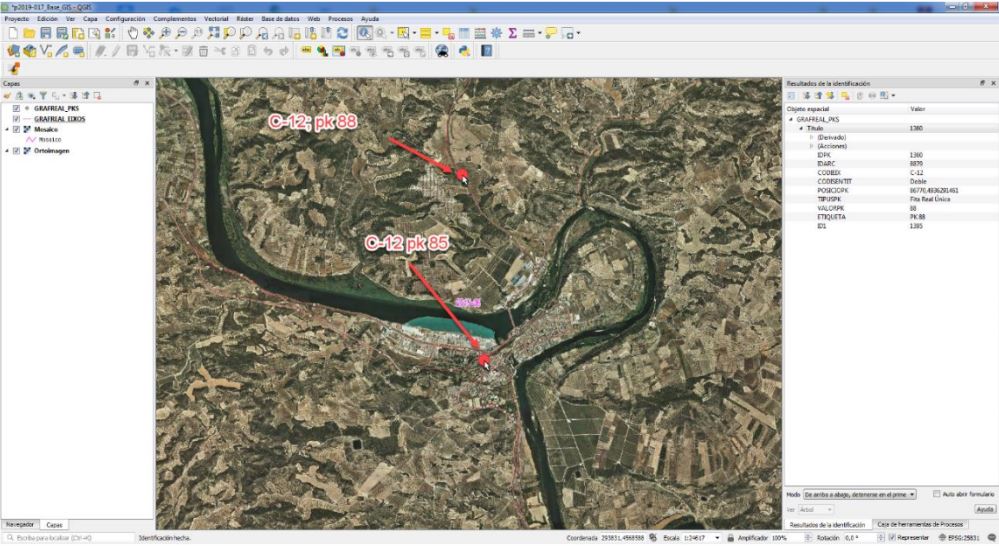
Fig.1 Encaje Zona Proyecto con ortofoto en QGIS
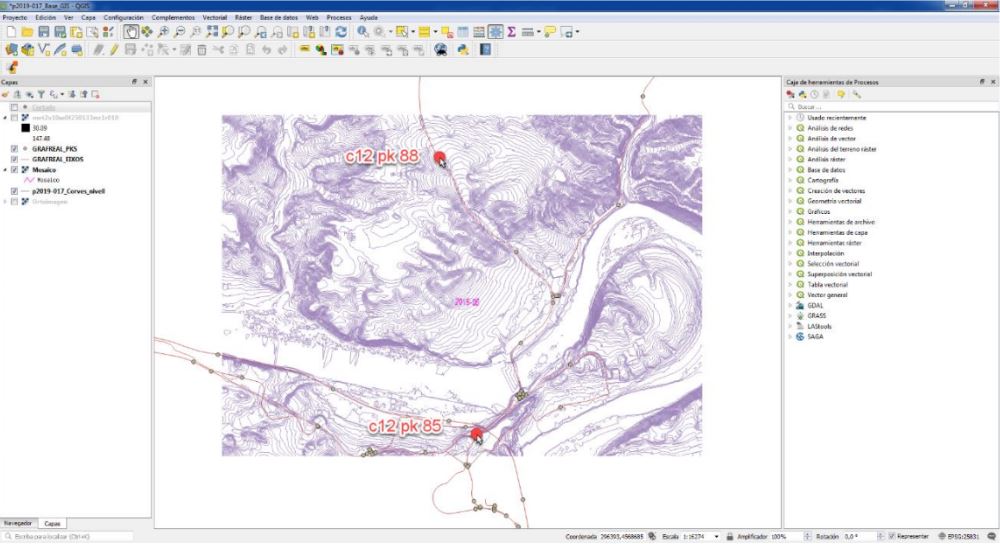
Fig.2 Datos de Terreno y GRAFO de Carreteras para zona de Proyecto en QGIS
Datos alfanuméricos del inventario de carreteras
La información del VIC se encuentra en una base de datos en formato de MS Acces, a la cual se ha podido acceder y para el tramo correspondiente de la carretera C-12, entre el pk 85+000 y el pk 88+000, se han seleccionado y extraído en formato .csv.
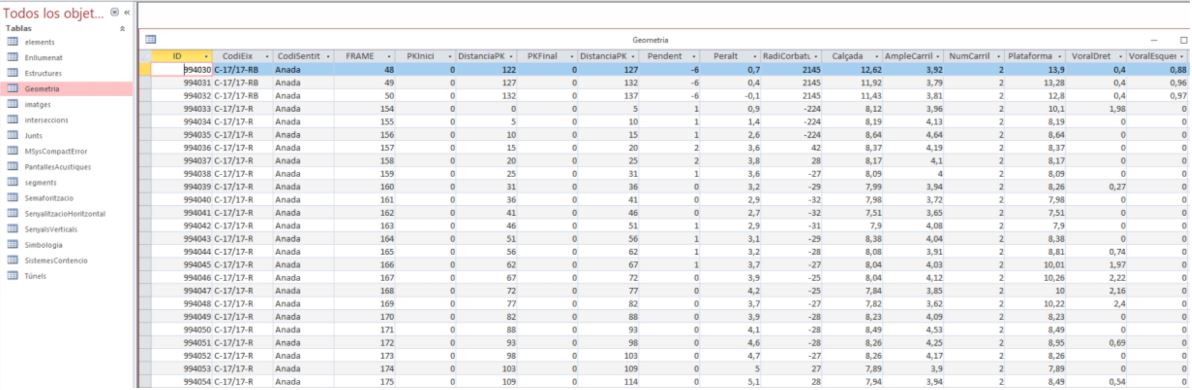
Fig.3 Metadatos el inventario Digital de Carreteras (VIC)
Los datos contenidos se agrupan en campañas de captación y a su vez en función de su naturaleza, siendo los siguientes:
Geometría de la Carretera:
- Plataforma
- Peraltes
- Radios
- Número de Carriles
- Ancho calzada
- Sistemas de contención
- Arcén Derecho
- Arcén Izquierdo
Señalización
- Señalización Vertical
- Señalización Horizontal
- Semaforización
- Simbología
Alumbrado
- Señalización Vertical y horizontal
- Semaforización
Herramientas utilizadas
Teniendo en cuenta las características del ejercicio y los requerimientos por parte del Departament habiendo analizando el estado actual del arte se ha escogido un “pool” de herramientas en base a los siguientes criterios:
- Facilidad y capacidad de programación para generar automatismos
- Capacidad para generar una exportación a IFC
De este modo la herramienta principal escogida para realizar el ejercicio ha sido
Autodesk Revit, utilizando para ellos entornos de programación gráfica como
Dynamo y scripts particularizados en lenguaje Phyton.
No obstante, y pese a la elección, al ser una herramienta muy centrada en Edificación, y no ser una aplicación BIM propia de diseño de carreteras y de obra lineal se han tenido que superar ciertos hándicaps a la hora de realizar trabajo de terrenos o de gestión de las coordenadas.
De todas formas, durante el transcurso del proyecto se han utilizado otros complementos de herramientas para los temas de comprobación inicial, transmisión de datos tales como QGIS, Infaworks o Civil 3D
Pasos realizados durante el ejercicio
Procedimiento del terreno
Para dotar de contexto y dotar de un soporte especifico a ciertos elementos del modelo (señalización vertical y luminarias), ha sido necesario contemplar la incorporación del terreno en el proyecto.
El origen del datos está en formatos ráster (.txt) que se han tenido que procesar y adaptar en el contexto de la herramienta. La estrategia escogida ha sido la de utilizar los datos descargados e introducirse en la herramienta Autodesk Infraworks.
Todos los trabajos se han desarrollado en el sistema de referencia ETRS 89 – TM -31, EPSG : 25831
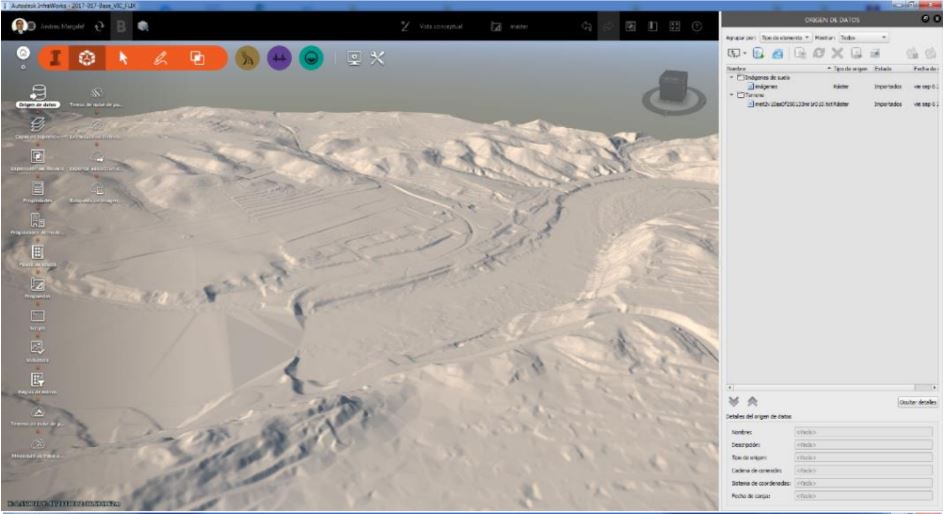
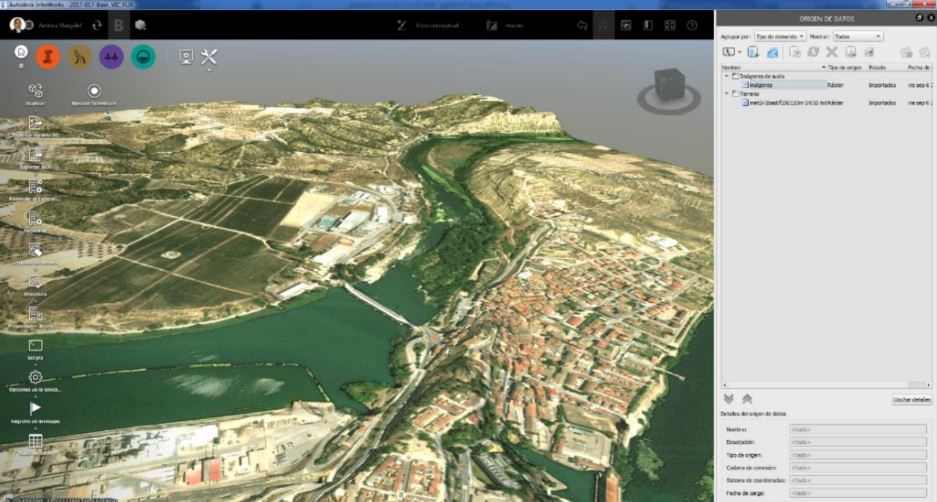
Fig.3 Detalle del terreno en la zona de proyecto
Desde Infraworks mediante el archivo .IMX se han transmitido los datos de terreno a Civil 3D para realizar una selección y exportación final al formato CSV / TXT que admite los scripts desarrollados en Revit.
Este flujo de trabajo ha permitido superar los problemas de geoposicionamiento implica realizar la inserción de un archivo sin automatismo.
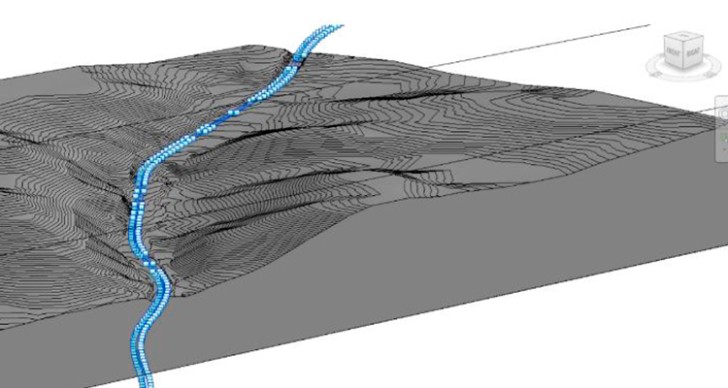
La estrategia que se ha desarrollado ha sido la siguiente:
- Seleccionar datos del terreno con mucha precisión en la parte actual de la
carretera y e del terreno adyacente. En esta zona se han transmitido los
puntos, con una alta densidad y gran capacidad de definición. De esta forma
se ha podido representar la cota actual de la plataforma y los taludes. En la
siguiente imagen se puede observar la selección:

Fig.4 Selección de puntos de terreno para caracterización del ámbito cercano a la carretera
- Por temas internos de la herramienta escogida, se necesita dotar de contexto de superficie que vaya más allá del propio de la carretera. Por esta razón se ha bajado la densidad de puntos y la precisión general del terreno, tal y como se puede observar en la siguiente imagen:
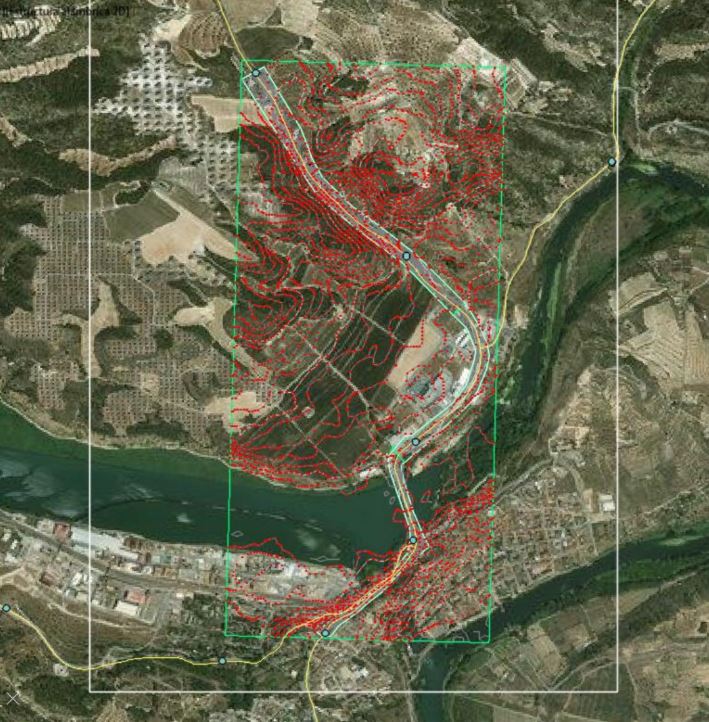
Fig.5 Selección de puntos de terreno para caracterización del contexto externo de la carretera
Posteriormente y gracias a la elaboración de un script propio se ha generado un único archivo .txt que combina los datos globales del terreno con todos los puntos. De esta forma se obtiene una única fuente de información.
Procesamiento del eje del grafo
Para poder realizar una comprobación global de los datos contenidos en el VIC antes de realizar cualquier proceso de modelado automático, se ha visto necesario realizar comprobaciones de posicionamiento con más fuentes de información. Para ello se la realizado un proceso de trabajo consistente en realizar el corte
vectorial de la Capa de Grafo de los ejes en el ámbito del proyecto. Para ello se ha utilizando la herramienta QGIS, y posteriormente el archivo vectorial .shp resultante se ha introducido en Civil 3D para procesar la información y obtener el listado de puntos del eje en planimetría en formato .txt
 Fig.6 Selección de puntos del Grafo de Carreteras, de la C-12 a su paso por Flix (pk 85+000 - pk 88+000)
Fig.6 Selección de puntos del Grafo de Carreteras, de la C-12 a su paso por Flix (pk 85+000 - pk 88+000)
Teniendo los datos del terreno, y del eje de la C-12 del
grafo de carreteras, se empieza a realizar la comprobación de los datos contenidos en el catálogo virtual. El primer dato que se analiza y contrasta es la información con respecto a la correcta geoposición del eje de la carretera. Si bien es verdad que las coordenadas disponibles en la base de datos corresponden a la zona central del carril derecho, que era por donde circulaba el vehículo con el dispositivo.
Gracias a la superposición visual se puede comprobar que los datos tienen coherencia y que se puede avanzar en el ejercicio en los pasos posteriores.
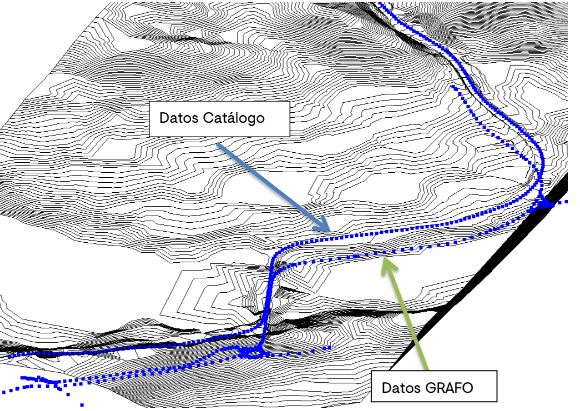
Fig.7 Contraste visual de la información
Creación del firme
Habiendo comprobado la fiabilidad de los datos de las coordenadas contenidas en el catálogo virtual, se ha podido modelar el firme de la carretera mediante la elaboración de varios scripts y procedimientos automáticos.
Para realizarlo se han utilizado los datos el eje de circulación, los datos del ancho de carril i los datos de los arcenes.
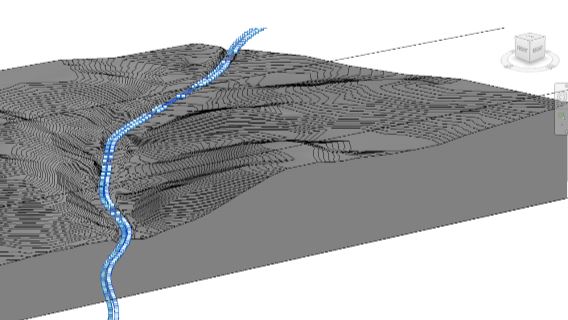
Fig.8 Creación del Firme
Inserción de la señalización vertical y luminarias
Para introducir la señalización vertical ha sido necesario detectarlos datos de posición. Obtenida la posición de las señales ha sido necesario capturar la posición más cercana al eje, y a partir de ahí obtener el sentido de la misma para poder realizar su orientación pertinente.
Para realizar su orientación se ha tenido que desarrollar un script special que realice de forma automática la función.
Los elementos de instalación como las luminarias también han tenido el mismo proceso de inserción que el de las señales verticales.

Fig.9 Introducción y Posicionamiento de la señalización Vertical
La inserción de la señalización horizontal ha sido uno de los puntos más complejos de todo el proyecto. En el catálogo virtual se parte datos acerca del inicio y fin de una determinada señalización a lo largo del recorrido. Los puntos intermedios han tenido que realizarse mediante una deducción, y además teniendo en cuenta que la
distancia de las líneas con respecto al eje del carril es variable. Existen líneas que no son paralelas al eje de la circulación Para poder realizarlo ha sido necesario buscar los puntos más cercanos a los extremos de la señalización con respecto al eje e interpolar datos de sus perpendiculares.
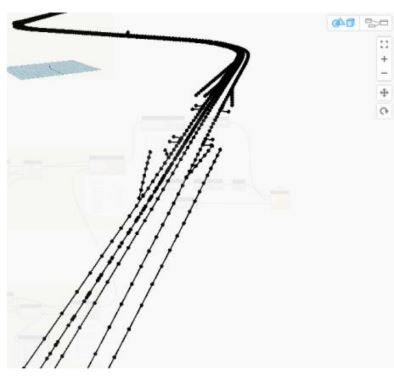
Fig.10 Introducción y Posicionamiento de la señalización horizontal

Fig.11 Vista de tramo de modelado de carreteras de forma automática a partir del Catálogo Virtual
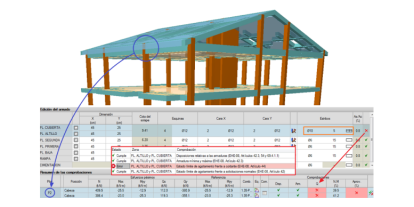
Inserción de datos y parámetros
Teniendo en cuenta los actuales requerimientos de información que se deben de disponer en los entregables
BIM as Built, y los actuales datos que existen en cuanto a caracterización y tipificación de los elementos de carretera en el catálogo virtual se ha realizado el proceso de creación de parámetros e introducción de los valores.
Una parte de este proceso se ha tenido que realizar de forma manual, tanto los propios datos del proyecto y de encabezado de los diferentes subsistemas (especialidades o entregables IFC) como también los parámetros orrespondientes al ámbito de identificación y de localización.
Los datos contenidos en el catálogo virtual si que se han podido introducir y trasladar mediante mapeo de forma automática, al igual que los parámetros referentes al ámbito de caracterización geométrica.
De acuerdo a los procedimientos propios de la herramienta, se han tenido que generar las vistas de exportación necesarias a partir de las cuales se configurn las exportaciones a formato IFC mediante la selección visual previa de los diferentes elementos del modelo que conforman cada una de los subsistemas:
- Exportación del Subsistema Firmes: capa de rodadura
- Exportación del Subsistema Elementos Funcionales: Señalización horizontal y
vertical
- Exportación del Subsistema Topografia: Terreno
- Exportación del Subsistema Instalaciones: LuminariasPara poder generar el contenido preciso de información que se requiere en cada
uno de los entregables IFC de los subsistemas ha sido necesario desarrollar la
caracterización correcta de las reglas de mapeo y exportación de las propiedades
y su agrupación correcta en forma de Pset: Identificación, Localización, Geometría,
Prestaciones comunes y especificas.
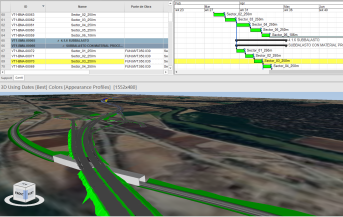
Generación del modelo coordinado
A partir de los diferentes subsistemas exportados en las tareas descritas anteriormente y a través de la herramienta Autodesk Navisworks se ha realizado la generación del Modelo Coordinado final. Para dotar al ejercicio de una mayor capacidad de ubicación y comprensión se ha añadido un objeto que contiene una ortofoto.
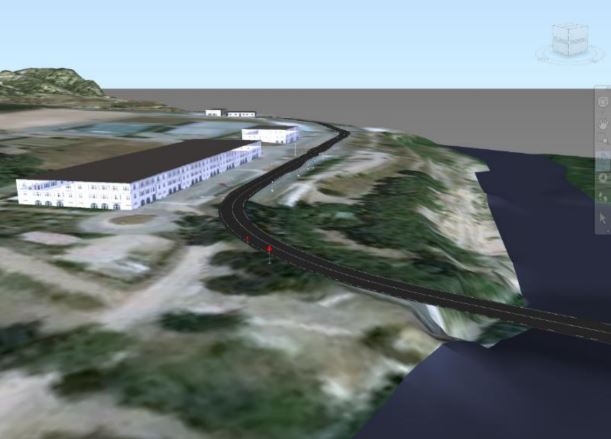
Fig.12 Modelo Coordinado Final con Ortofoto
Conclusiones
Realizado el ejercicio se pueden indicar las siguientes conclusiones:
- Los datos contenidos actualmente en el catálogo virtual en general son coherentes, más allá de encontrar algún pequeño error en las características de la señalización horizontal. Son datos que tienen consistencia y están bien elaborados.

- Gracias a tener unos datos coherentes se ha podido generar una serie de automatismos en donde a partir de la lectura de las mismas se han generado de forma automática los elementos de firmes, señalización e instalaciones perfectamente ubicados en el tramo del ejercicio.
- El proceso de generación del terreno, para dotar de contexto y soporte en el modelo no es ni automático ni eficiente. Ha sido necesario trabajar y adaptar los datos del terreno con dos niveles de precisión, totalmente condicionadas con la tipología de herramienta utilizada para el ejercicio.
- En un futuro de digitalización, la herramienta utilizada no es la adecuada: es una herramienta de edificación si capacidad de trabajo eficiente en temas de georreferenciación, además de tener limitaciones con la capacidad de trabajo en obra lineal y en terreno.
- La interpretación final del terreno y su modelización ha generado, a consecuencia de los automatismos, que los postes de las señales verticales representados han tenido valores de alturas incorrectas. La placa de señalización está bien posicionada, pero la cimentación depende del terreno.
- En ningún caso se han podido interpretar más datos del catálogo virtual (VIC) más allá de los metadatos. Las nubes de puntos obtenidas en el proceso de captación y que están integradas en el mismo por un tema de incompatibilidad de formatos no se han podido utilizar. Es necesario disponer de formatos como rcp, xyz, e57.
- En las próximas campañas y restituciones del catálogo virtual, sería necesario incluir más datos de propiedades de los elementos. Muchos de los parámetros que actualmente se requieren en los BIM As built, no están presentes.
- En el proceso de creación del catálogo virtual y en la parte correspondiente a la introducción de ciertos metadatos, seria interesante tener planteamientos de automatismos para evitar errores humanos en su tipificación.
El ejercicio ha permitido comprobar que es factible hasta cierto punto digitalizar el catálogo. Estas digitalizaciones tendrían que enfocarse o bien en una tramificación de la red mediante los actuales arcos del Grafo , o bien mediante la selección de tramos y modelización automática de los mismos.
También sería planteable, teniendo en cuenta el estado actual del arte, prescindir el terreno en la forma en la que se ha planteado en este ejercicio: es el único proceso no automático. En un futuro, o bien se prescinde de ellos, o bien se tienen que disponer de una base de datos trabajada a tal efecto y de formato y contenido diferente a lo que actualmente se dispone.
Artículo original:
Apogea
Autor:
Agustí Jardí, Director del Máster Internacional BIM Management en Ingniería Civil. Infraestructuras y GIS.